


Mini-M16C, Mini Sumo Autonomous Robot
The Mini-Sumo is a 10 cm2 robot that has a weight restriction of 500 g. These robots are completely autonomous and are designed to push an opponent outside a designated ring. Due to the size and weight restrictions, the Renesas M16C was an appropriate choice because of its size, power and speed. The Mini-M16C is mini sumo robot designed around the Renesas M16C with two continuous rotating hacked Futaba servos acting as the motors, an edge sensor (QRD1114) and a distance sensor (Sharp GP2Y0A21YK) which acts as the eyes of the robot
The Futaba S2003 servo is meant to act as a positioning servo which is able to rotate 180o. With a small modification, the servo can rotate a full 360 o continuously. Applying a 1.5ms pulse at approximately 650 Hz, the servo is at the rest position. When the pulse is varied to 1.0ms at the same frequency, the servo rotates to its maximum speed. The same thing happens when the pulse is varied to 2.0ms but in the opposite direction. These pulses are given to the servos to make the robot move forward, backwards and the ability to turn in either direction. The PWM option from Timer-A was used to create the correct pulses to control the motors.
The ability of the robot to sense the edge of the ring was accomplished by using the QRD1114 sensor. Since the Mini-Sumo ring only consists of two shades (black and white), the QRD1114 connected to AD2 (Analog to Digital Converter) port tells the robot when it comes in contact with the edge of the ring. This is accomplished by having one end of the detector applied to the positive voltage and the other end connected to the AD2 port. With different amount of reflection detected by the sensor, this allows a diverse amount of voltage to be applied to the detector part of the sensor. This in turn communicates to the microcontroller that the robot is near the edge of the ring.
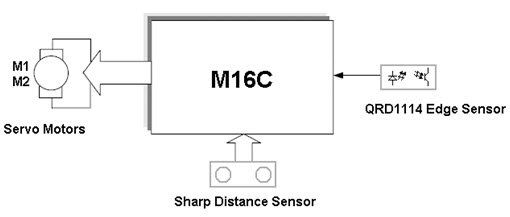
For the robot to know when it is near an opponent, it needs a means of seeing. The Sharp GP2Y0A21YK distance sensor is used for this purpose. All the necessary circuitry is already built into the sensor so all it needs is power and it is ready to send a signal to the processor. The signal is applied to the AD3 port for the microcontroller to be able to find and locate the opponent. As soon as the opponent comes in range of the sensor, the robot knows to attack and try to push it out of the ring.
As a means of power for the robot, two power sources were chosen both using a 5V regulator. One source using four AA batteries was used to power the microcontroller board and the other source using 9V batteries was strictly for the motors. Since the motors use a lot of current, separate batteries were needed.




