


ArduRoller Balance Bot
This project shows you how to build a balance robot based on Arduino named as ArduRoller. It has nice chassis design and balances quite well on the spot. The robot also responds to knocks pretty quickly but sometimes giving it a more gentle push sends it gliding across the room at a constant speed. Shaun Crampton, the project designer, builds the bot based on Arduino Uno and using 150 degree/s gyro (sensor for the angle rate) and 1.7g Accelerometer sensor.
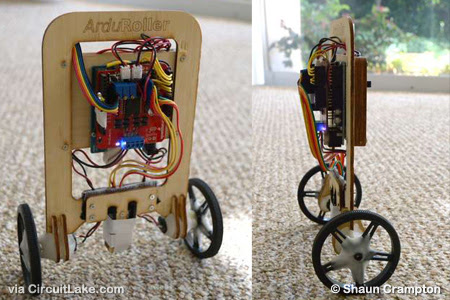
The project also features Bluetooth modem for telemetry and planned to use it for remote control from Android phone in the next development. The balance bot is powered by 2 x 850mAh Polymer Lithium Ion Battery.
Self Balancing Bot
Project Firmware, Schematic and Documentation
instructables.com




